|
Muhammad Fadhil Ginting I am a PhD candidate in AI Robotics at Stanford University advised by Prof. Mykel Kochenderfer in the Stanford Intelligent System Laboratory (SISL), part of the Stanford Artificial Intelligence Laboratory (SAIL). My research is supported by the Stanford Graduate Fellowship and in collaboration with NASA Jet Propulsion Laboratory (JPL) and a robotics startup Field AI. Before joining Stanford, I was a visiting researcher at NASA JPL for two years and was one of the key members in the JPL-led team for the DARPA Subterranean Challenge that won the 2020 DARPA Subterranean Challenge Urban Circuit . I completed my Master’s degree in Robotics at ETH Zurich. I received a Bachelor of Science in Electrical Engineering from Institut Teknologi Bandung, graduating as the valedictorian. |
|
Updates
|
ResearchMy research interests lie in enabling embodied AI for robots to navigate and interact with unstructured environments using risk-aware autonomy and large foundation models. I am a full-stack roboticist with experience in developing cutting-edge algorithms for perception, planning, control, and communication, as well as deploying robots in the field for real-world use cases. |
|
SayComply: Grounding Field Robotic Tasks in Operational Compliance through Retrieval-Based Language Models
Muhammad Fadhil Ginting, Dong-Ki Kim, Sung-Kyun Kim, Bandi Jai Khrisna, Mykel Kochenderfer, Shayegan Omidshafiei, Ali-akbar Agha-mohammadi Under review, 2024 Arxiv, Website We propose a task planning method for robots that must comply with operational manuals in real-world settings using a tree-based retrieval augmented generation technique. |
|
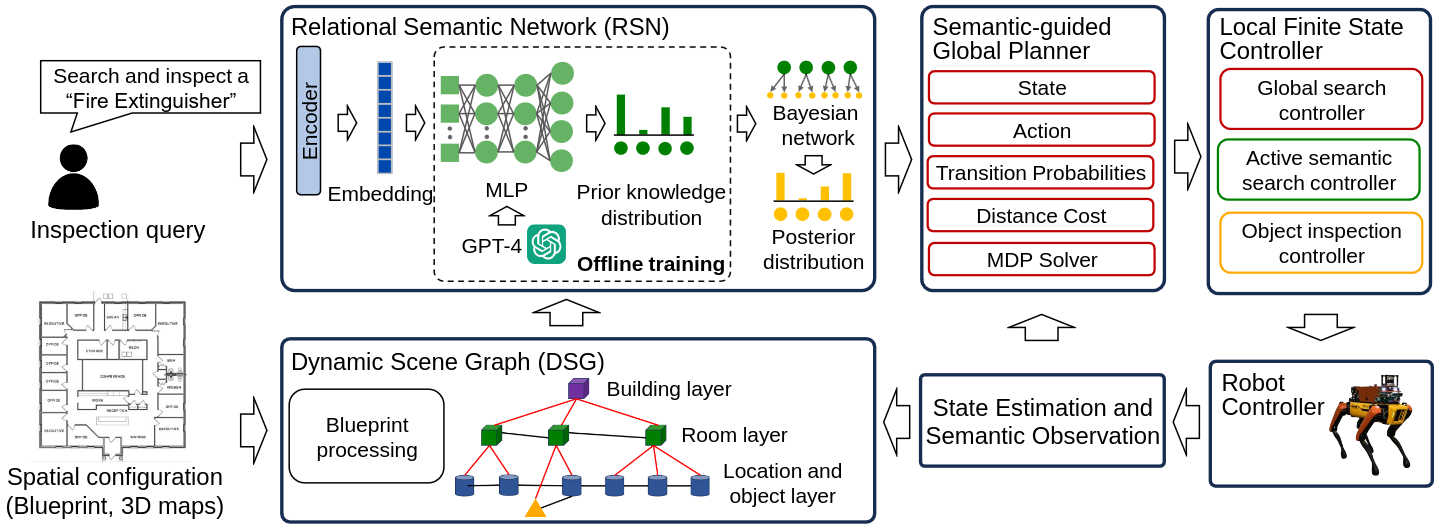
SEEK: Semantic Reasoning for Object Goal Navigation in Real World Inspection Tasks
Muhammad Fadhil Ginting, Sung-Kyun Kim, David Fan, Matteo Palieri, Mykel Kochenderfer, Ali-akbar Agha-mohammadi Robotics: Science and Systems, 2024 Arxiv We propose a probabilistic planning method for object-goal navigation that uses relational semantic knowledge and prior spatial configuration for real-world inspection. |
|
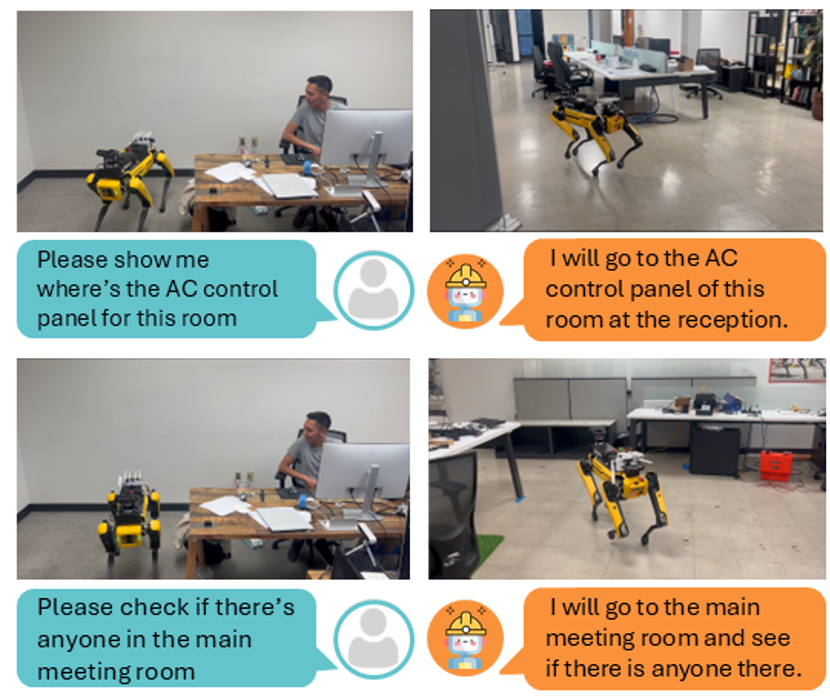
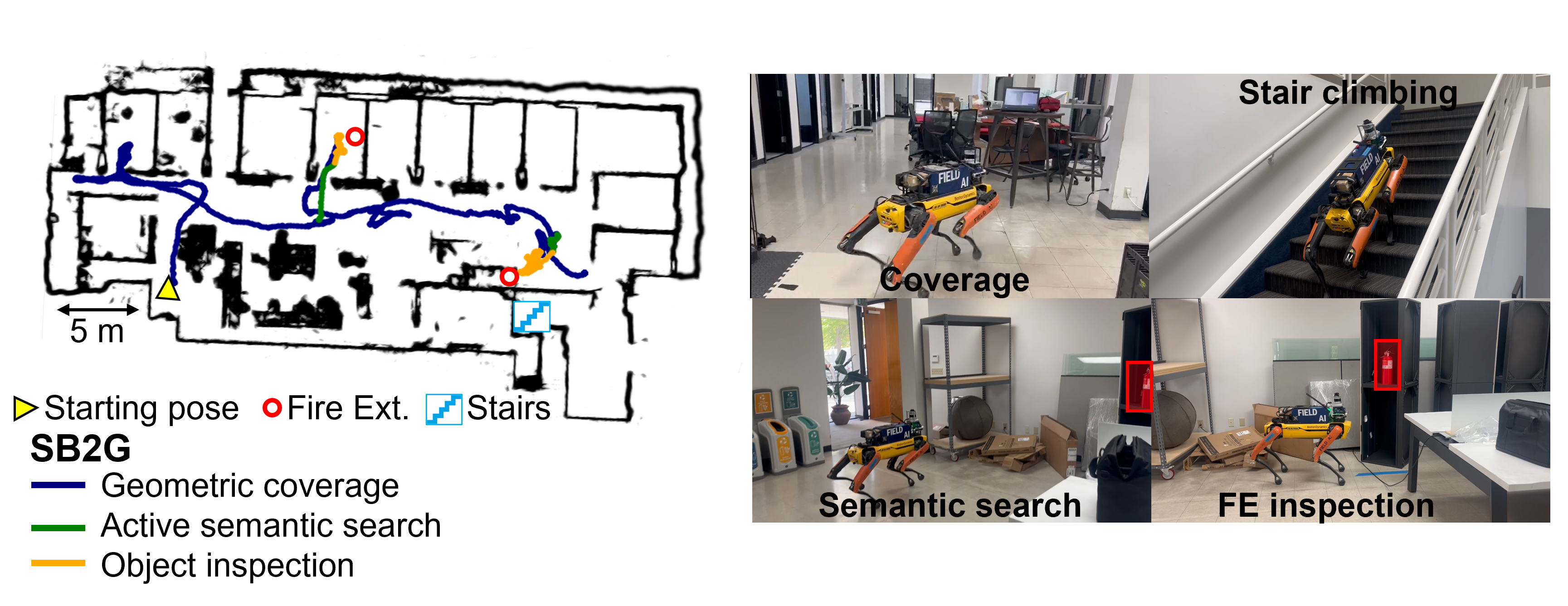
Semantic Belief Behavior Graph: Enabling Autonomous Robot Inspection in Unknown Environments
Muhammad Fadhil Ginting, David D. Fan, Sung-Kyun Kim, Mykel J. Kochenderfer, and Ali-akbar Agha-mohammadi IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 Arxiv We propose a belief-space task planning framework for semantic-based navigation in real world inspection. |
|
Safe and Efficient Navigation in Extreme Environments using Semantic Belief Graphs
M. F. Ginting, S. K. Kim, O. Peltzer, J. Ott, S. Jung, M. J. Kochenderfer, and A. Agha-mohammadi IEEE International Conference on Robotics and Automation (ICRA), 2023 Arxiv |
|
Capability-Aware Task Allocation and Team Formation Analysis for Cooperative Exploration of Complex Environments
M. F. Ginting, K. Otsu, M. J. Kochenderfer, and A. Agha-mohammadi IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022 Paper |
|
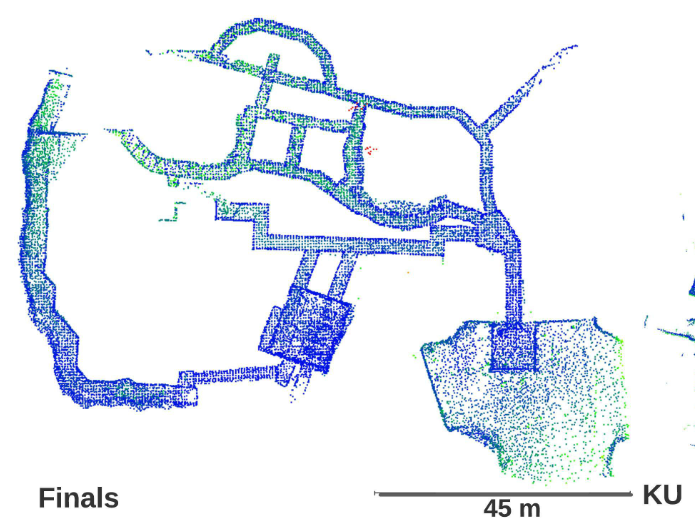
LAMP 2.0: A Robust Multi-Robot SLAM System for Operation in Challenging Large-Scale Underground Environments
Y. Chang, K. Ebadi, C. E. Denniston, M. F. Ginting, A. Rosinol, A. Reinke, M. Palieri, J. Shi, A. Chatterjee, B. Morrell, A. Agha-mohammadi, L. Carlone IEEE Robotics and Automation Letters (RA-L), 2022 Arxiv |

|
Autonomous Mapping and Characterization of Terrestrial Lava Caves Using Quadruped Robots: Preparing for a Mission to a Planetary Cave
J. G. Blank, B. Morrell, A. Bouman, T. Touma, M. F. Ginting, C. Patterson, A. Agha-mohammadi Workshop on Terrestrial Analogs for Planetary Exploration, 2021 |

|
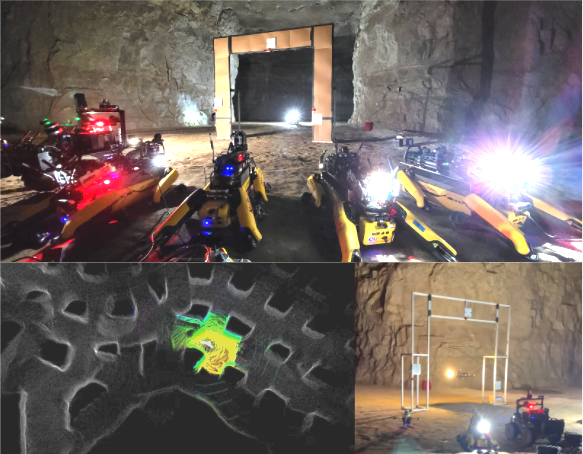
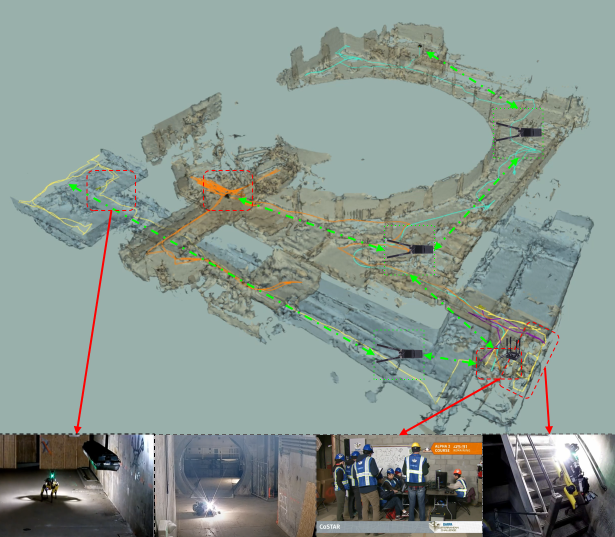
Nebula: Quest for Robotic Autonomy in Challenging Environments; Team CoSTAR at the DARPA Subterranean Challenge
Journal of Field Robotics, 2021 Arxiv |
|
CHORD: Distributed Data-sharing via Hybrid ROS 1 and 2 for Multi-robot Exploration of Large-scale Complex Environments
M. F. Ginting, K. Otsu, J. A. Edlund, J. Gao, and A. Agha-Mohammadi IEEE Robotics and Automation Letters (RA-L), 2021 Paper |

|
Copilot MIKE: An Autonomous Assistant for Multi-Robot Operations in Cave Exploration
M. Kaufmann, T. S. Vaquero, G. J. Correa, K. Otsu, M. F. Ginting, G. Beltrame, A. Agha-Mohammadi IEEE Aerospace Conference, 2021 Paper |

|
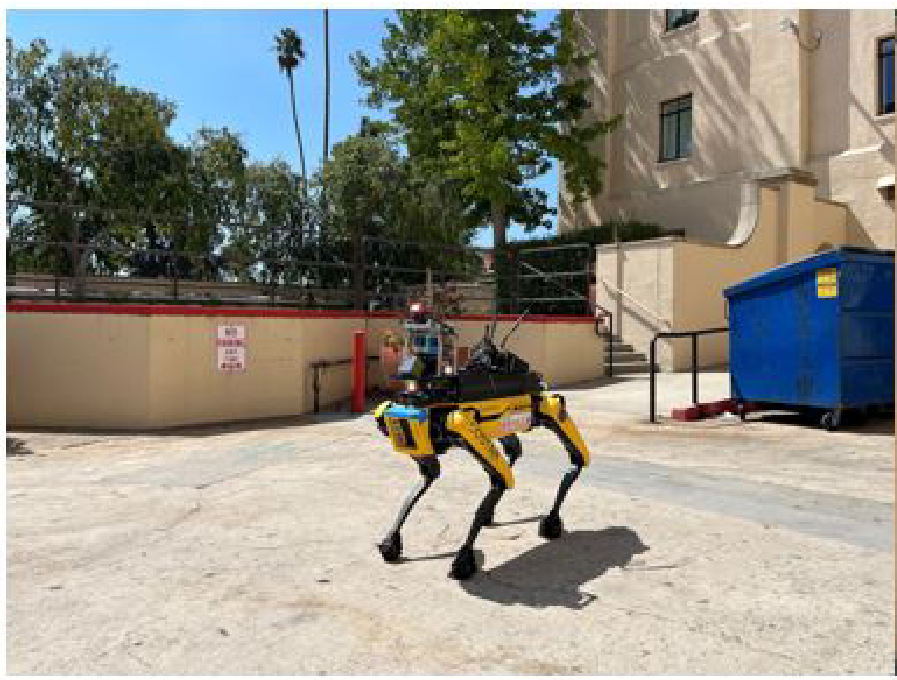
Autonomous Spot: Long-range Autonomous Exploration of Extreme Environments with Legged Locomotion
M. F. Ginting*, A. Bouman*, N. Alatur*, M. Palieri, D. D. Fan, T. Touma, T. Pailevanian, S. K. Kim, K. Otsu, J. Burdick, and A. Agha-Mohammadi IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 Best Paper Award on Safety, Security, and Rescue Robotics Paper |
Media Coverage |



|
Website design credits to Jon Barron. |